




Generative Design Helps Students Improve Their Career Prospects(英文课程)
The South China University of Technology (SCUT) robotic team never stop seeking brand-new solutions for improved efficiency and quality workflow from design to manufacturing. Zhen-Po led his team, the South China Tigers, to a first-place RoboMaster region
基于点阵结构的仿人机器人下肢轻量化研究
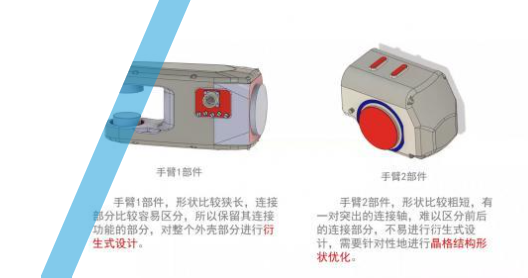
参考人体下肢骨骼系统的结构和行走步态,建立了仿人机器人下肢的原始模型。其次根据机器人的重量和平地行走步态,通过步态仿真获得了机器人下肢,各零部件的主要受力情况。根据机器人足踝部、小腿和大腿的受力情况,分别使用拓扑优化方法和衍生式设计方法对其进行结构优化设计。对机器人下肢三个主要部件的衍生式设计模型进行点阵结构优化,并根据点阵结构的表皮、支柱截面、节点尺寸对模型强度的影响,从这三个方面对模型细节进行修改,使得最终优化模型的强度和刚度满足要求,保证二次优化模型的有效性。之后,对优化模型进行 3D 打印仿真,验